
帝国理工学院(Imperial College London)是世界顶尖的公立研究型大学,于1907年建立于英国伦敦,是英国罗素大学集团、欧洲研究型大学联盟和国际科技大学联盟成员,与牛津大学、剑桥大学、伦敦大学学院、伦敦政治经济学院等校并称为金三角名校和G5精英大学。学院校友中,有14位诺贝尔奖得主、3位菲尔兹奖得主。2021 QS世界大学排名为第8位。
本项目由帝国理工学院工程学部的Prof. Guang-Zhong Yang和医学学部的Dr. Benny Lo担纲授课教师,项目主题为“Innovating the Future with Robotics, IoT and AI”。项目融合专业课、辅导课、小组项目等教学元素,旨在帮助学生理解当今时代机器人、人工智能、物联网等先进技术的发展,培养应用知识和学习经验来设计开发机器人和虚拟现实应用程序的能力,考核成绩达标者可获帝国理工学院官方签发的项目证书,我校共83%的同学荣获A(Distinction)等级评价,并在小组项目中表现突出。



学生小组项目成果
<学生感言>
石雨森-国际学院-物联网专业本科生
帝国理工暑校机器人与物联网与人工智能方向时长共6周,前5周有5次主课,第6周为小组项目展示。前5周内容包括机器人与AI、普适传感和物联网、机器视觉和人工智能、人工神经网络和深度学习、数据可视化和虚拟现实。
我们最主要的目标是完成一个用机器视觉,深度学习,以及gazebo建模实现的小型模拟机器人,需要用到以上话题的相关知识。由于之前没有具体接触过这些知识,我感觉并不容易。
上完所有课之后,我个人感觉课程涵盖了一些热门话题,但由于每次课的主题不同,整体课程内容偏向导论性质。老师会解释某一块内容,它的逻辑是什么,目前的研究进展如何,有哪些应用场景,以及做简单的代码展示等。所以如果要切实应用这些知识,比如深度学习,还需要自己找一些网课认真深入学习。
我对课程整体比较满意,它们让我对热门话题有了大致的了解,拓展了视野,了解了行业前沿,并且对我们的开发也有一定启发作用。不过我建议未来这门课可以增加对实际操作中问题的讲解,以及实际操作所需的知识,可能会更有帮助。如果有学弟学妹今后想参加暑校项目,我也会推荐他们去报内容更具体、更具实操性的项目,而不是导论性项目。
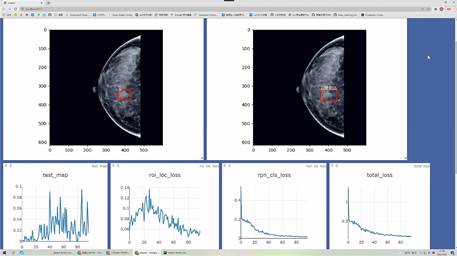
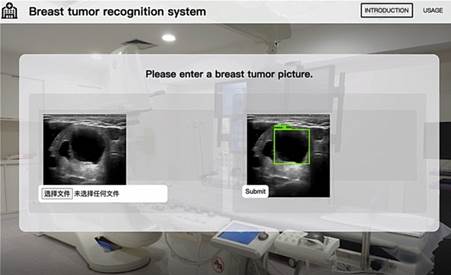
我们最终的目标是完成一个项目,其中要用到深度学习、建模等方面的知识。第一次课上,教授为我们展示了一个成品——扫地机器人,用到了建模图像识别等技术。在之后的小组讨论中,我们组认为肯定会有别的小组做类似项目,为了更有创新,我们没有选择做扫地机器人。因为组内有一位同学有医学相关背景,也有大量肿瘤ct、核磁共振的影像,样本足够,所以简单协商之后,我们决定做一个肿瘤识别加机械臂模拟操作的模型。
但是因为时间的限制,我们的机械臂不可能特别完善,能对肿瘤进行精确操作,比如实际肿瘤在操作中会有一些位置的变化,而且实际操作时肿瘤不完全是硬的,这也会带来一些偏差。我们决定的大致流程是先对图片进行识别,框出肿块位置,之后将机械臂移动到对应位置,对这个流程进行简单模拟。
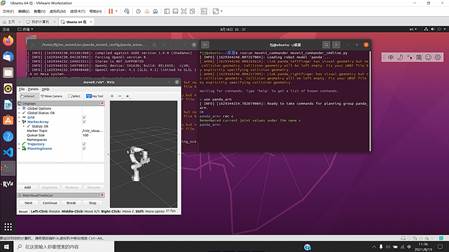
实际操作中,我们遇到了很多不同的问题,也花了很多时间去解决,比如最初安装ROS可以正常运行,但是在PyCharm里2.7版本的解释器没有rospy这个包,还有安装不上ROS、虚拟机卡死、update失败等等。比较严重的是update失败,在网上查找时,我们发现很多人都遇到了相同的问题,网上有各种各样的解决手段,我们把大多数办法都试了一遍,最后终于解决了问题。
实际项目过程中,我们都是边学边做的。组内6个人交流效率还是比较高的,我们约定每天或每2天都开一次腾讯会议,分享一下目前进度和遇到的问题,还会在微信群里分享可能有帮助的网址。虽然我会的并不多,但还好组里有3位同学技术水平很高,而且也乐于做讲解。总体来说开发速度还是比较快的,而且小组有位同学手上已经有肿瘤识别的源码,为我们减少了很多工作量。
经过多天的努力,我们的机械臂做出来了,不过在衔接处有一个必须手动的问题。本来我们打算通过话题的方式,让机械臂自动移动到相应位置,不过最后也没把话题搞明白。同时一个很关键的问题是,不管是CT图还是核磁共振图都是二维的,所以在图上标出来的坐标也是二维的,但机械臂需要三维坐标,我们也不得不手动输入一个坐标。所以最后在移动机械臂方面我们选择了手动操作,这确实是一个遗憾。
最后的项目展示比较顺利,组内两位同学先介绍了一下我们的开发思路,说明了我们项目的意义和重要性,随后对项目进行细致讲解,然后播放了一段实际演示的视频。在老师提问环节,我们也回答得比较顺利。总的来说,我们的项目有新意,也有技术含量,但关键问题是实现程度不高,距离实际应用显然有很大差距。有另外有两个组做得很好,其中一组做的是赛车模型,可以按规定道路行驶规划最优路线,并且避开障碍物;另一组做的是垃圾分类处理车,车上有机械臂带着摄像头,车辆也可以识别障碍物。我们组一致认为这两组的成果比较接近实际应用。最后优胜组是做垃圾分类处理车的那组,确实是当之无愧。
顺利结业之后,我们组获得了全A评级,我们自己对结果也感到比较满意。这次暑期学校让我们学到了很多东西。之前自学的一些深度学习和python的知识得到了实践机会,从而加深了对理论知识的理解。在实践过程中,有很多知识是平时没学过、没接触过的,需要我们自己搜集资料,自主学习,例如话题、ros、gazebo、moveit等,极大地锻炼了我们的学习能力。除此之外,我感受到小组协作的重要性——要顺利完成项目,小组成员间的紧密交流与配合是必不可少的。在分工之前,一定要统一好结构框架,防止各自工作完成后无法衔接。在完成各自工作的过程中,我们也都及时就发现的问题和需要改进的地方进行交流,因为每个人对自己工作的微小改动都可能影响另一个人的工作,所以我们会及时更新一些代码,及时互相update,避免后期问题的出现。
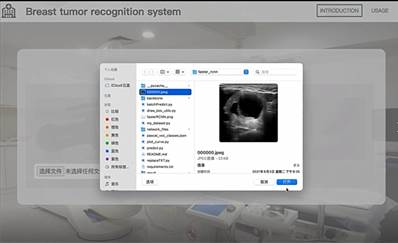
以下是我们的成果展示:
陈乐妍-国际学院-物联网工程专业本科生
课堂上,我印象最深刻的是有一节课的习题涉及到概率论相关的知识,概率论是我上学期学的课程,由中方老师授课,采用传统中式教学模式。在这次暑校中,我得以用英方的思维方式重新接触这一话题,获得了一些新的思考。
整个课程主要围绕机器人,让我从各个维度接触了机器人的相关知识。大一时我报名了人工智能选修课,但是当时还没学线代、信号与系统的知识,所以对卷积和一些算法理解不深,上课的时候就是一个比较懵的状态。但是两年过去,在大学中有了一定知识积累后,我发现理解起来没有那么困难了。对我来说,这次暑研更多的是带领我综合回顾了以前接触过、但没有深入了解的知识,帮助我建立了一定的知识体系,也让我更加感受到大一大二基础课的重要性,基础课不仅帮我们打好数理基础,更能为未来发展奠定基石。
通过这次暑研,我对人工智能也有了一定的感性认识。人工智能是一门极富挑战性的科学,从事这项工作的人必须懂得计算机知识和其他相关理论。人工智能内涵丰富,由不同的领域组成,如机器学习,计算机视觉等等。总的来说,人工智能研究的主要目标是让机器能够胜任一些通常需要人类智能才能完成的复杂工作。人工智能的定义可以分为两部分,即“人工”和“智能”。“人工系统”就是通常意义下的人工系统,而“智能”则比较抽象。这次暑研将人工智能与机器人、机器视觉、深度学习结合,进行整体性的讲授,让我对概念的理解更加深入。从概念上来说,人工智能是人造的智能,是计算机科学、逻辑学、认知科学交叉形成的一门科学,简称AI。这个概念比较抽象,通过课程学习,我对它有了更加具象化的理解。
本次课程还让我初步了解了人工神经网络和深度学习。所谓人工神经网络就是基于模仿生物大脑的结构和功能而构成的一种信息处理系统。人工神经网络是一个古老的概念,早在上世纪四十年代就有人提出了人工神经网络的概念模型,这是模拟人脑或者说是生物脑的一种方法,比如阈值加权模型就是模拟的神经元之间的树突与轴突的联系,生物的神经元只有达到一定的兴奋程度才能向外传递信息,而类似的阈值加权模型也是如此,只有输入的加权达到一定的阈值才会向外有一个输出。而hebb学习律则假设突触之间的联系是可变的,模拟了人类学习的过程。因为维持神经元之间的联系需要消耗很多能量,根据使用频率,我们会调整不同神经元之间的联系强度,用得多的就会维持较高的联系强度,反之则会处于抑制状态。人工神经网络是人工神经元组成的并行自适应网络,目标是对人类神经系统的某个功能进行抽象和建模。
我的专业是物联网工程,但对物联网的了解浮于表面,通过这次学习,我能够更加切身的体会到物联网和生活的联系。物联网把新一代IT技术充分运用在各行各业之中,具体地说,就是把感应器嵌入和装备到电网、铁路、桥梁、隧道、公路、建筑、供水系统、大坝、油气管道等各种载体中,然后将“物联网”与现有的互联网整合起来,实现人类社会与物理系统的整合。在这个整合网络当中,存在能力超级强大的中心计算机群,能够对整合网络内的人员、机器、设备和基础设施进行实时管理和控制。基于此,人类能够以更加精细和动态的方式管理生产和生活,实现“智慧”状态,提高资源利用率和生产力水平,改善人与自然间的关系。
从课堂互动上来说,教授会利用menti网站穿插一些课堂提问,通过输入同样的数字来实现与老师的实时沟通。这种互动方式与我在学校里上英方课时所用的一样,在学校上课时,我还不太能适应这种方式,但通过这次交流项目,我发现这样能提高线上课程的效率,有效、节奏适当的互动也能让学生的精力更加集中。
小组合作方面,我虽然没有担任组长,但也在过程中学到了很多。我们组的组长非常负责,在小组任务发下来后就及时安排开会,确定讨论选题后又将任务进行了细分,也在deadline前督促我们完成。最后的结果也不错,让我充分意识到小组合作的重要性。一个人能完成的工作量有限,在合理分工下,每个组员都能有充分的参与感和收获感。
不管是学习、课堂交流还是小组合作方面,这次暑研都给我带来了积极的影响,如果明年的寒暑假时间安排不冲突,我希望能再次参与此类项目。
小组作业
上课软件
交流平台
邓孝煊-国际学院-电子商务及法律专业本科生
本次暑研课程中,我们学习了有关机器人建模的知识,了解了前沿的机器人资讯,并且学习了如何用Solidwork对机器人进行建模。两位授课老师还为我们介绍了机器人鱼及用于外科手术的机器人,包括这两种机器人的开发背景、使用环境、具体操作和作用效果等,为我留下了深刻印象。两位老师深入浅出地讲授了有关IoT和BSN的内容,着重聚焦硬件平台BSN、OSI模型、MAC、网状拓扑结构、ISM、无线电传输环境、ZigBee的运用和蓝牙方面的介绍等。课程还涉及傅里叶转换、卷积、预处理、滤波器等知识,唤醒了我之前在信号与系统这门课中接触到的内容。每堂课都是干货满满,课程所涉范围非常广,知识点也很密集,需要及时预习和复习。助教会把每节课的录像和PPT上传到Box平台,供大家课后复习巩固。且每堂课后都安排了1个小时的课后练习时间,供我们完成与这堂课内容相关的练习,如果有疑问,可及时与老师或同学交流,效率很高。
团队协作的部分也让我受益匪浅。基于本次课程中学习到的深度学习和神经网络相关的知识,我们小组共同开发了一款基于python的垃圾分类识别系统,通过识别垃圾照片自动完成分类。开发过程是跌宕起伏,但有惊无险。初始模型仅训练一轮就需要至少20分钟,在轮次不足和运行设备的压力下,我们一起克服困难、优化算法,最终将训练时间控制在了5秒以内。由于是线上协同工作,一位组员更是租借了一个GPU,以实现高效训练。每位组员都在项目中有不同程度的成长。感谢本次项目中的每位老师和同学,让我们共同书写了一段难忘的经历。

图:工厂产品细节图(小组项目)

图:智能垃圾分类桶示意图(小组项目)
高子洋-国际学院-物联网工程专业本科生
三周,说长不长,说短不短。三周,共同进步,双向奔赴。
在2020-2021学年的寒假期间,我有幸参加了为期三周的帝国理工学院机器人与人工智能短期项目,在刚刚结束的三周学习生活中,我收获颇丰,同时也对我这三周内的所见所闻进行一些反思和总结。
在这个暑期项目还未开始时,就听过学长姐们对类似于此的大小项目的各种爱恨情仇,什么“一个bug de一天”、“一个代码码一宿”、“奋斗两周,我要上A”之类的魔幻语录,但真正自己做起来时,其实收获肯定是更多的。
我对人工智能,尤其是机器学习领域有着比较浓厚的兴趣,因此在参加项目之前,我就对项目课程安排中涉及的一些概念有一定程度的了解。而在Professor Yang和Benny两位学识渊博的老师的讲解下,在三周的学习后,我进一步深化了对已有知识的认识。特别是在Computer Vision and 3D系列课程中,我了解了计算机视觉,机器视觉,计算机图形学的一些知识,并学习了用如何专业的语言去描述机器人与人工智能科技的最新发展,理解了有关普适测量、物联网及其相关技术的基础知识,并且运用课上所学知识和经验来开发机器人和人工智能应用。
本次暑期课程,所有学员分为七个小组,每个小组都要设计构思一个具有商业价值的idea并在三周的学习过程中逐渐分工合作完成这个项目。由于我是大一新生,且之前并未有过关于此类任务的经验,我便负责一些技术含量及难度不高的工作。在每一次分工合作交流中,我都会从学姐学长身上学习到新知识,课余时间也会主动在Coursera和Edx上“加餐”,来弥补我专业知识上的不足。因此,短短几周内,我感觉自身能力显著提升。

大一的时候,我并没有认真对待计算机语言,导致最终成绩没有那么理想。本着夯实基础的想法,在项目开始之初,我便认真学习Python,总算是在连续几天的挑灯夜战后形成了一定的学习惯性,并且成功地提高了自己的专注度。因为已经多遍复习,而且养成了看优秀源码的习惯,所以在合代码时,看懂其他人的代码对于我来说并不困难,自己在编写时也对当前工程有更加清晰的认识。
而且,由于Python是面向对象的语言,有很多方面的概念和理念与C++相像,这不仅使我回忆起先前学习C++的知识,还使我对这两种语言构建了联系,形成“举一反三地理解”。相较于以前,对新知识的接受能力和速度明显提升。

更重要的是,在这几周的饱和学习中,我培养了对编程、代码的兴趣。帝国理工的老师讲授新知识或新定义时,会引入一些我们生活中接触过的例子,让不同水平的同学都能理解。这种教学思路促使我们自主思考,并且有效激励我们自发查找更多资料,学习过程中,我感觉自己的代码水平显著提高。
这次的summer school大大开拓了我的眼界。让我见识到了前沿的科技,同龄人的优秀。听过Benny老师的介绍和同学们相关资料的补充,我才意识到原来现阶段的机器学习技术已经被广泛运用于医学。大家一起做项目时,我由衷感慨同龄人的优秀。参加此次项目的同学来自天南海北。年级最低的是大一,最高大四。他们中有的擅长英语,口语表达行云流水,有的则早已在人工智能的领域摸索良久,能搭建非常复杂的网络结构,有的对计算机视觉的知识了如指掌,能快速编写符合项目要求的Computer Vision程序。在和他们相处的过程中,我真切的感受到了他们对技术能力的不断追求,以及敢想敢为的强大执行力,也正是因为这样,他们才能通过自学啃下一个又一个技术。更让我惊讶的是他们身上所展现的那种信心以及乐观的态度、永远丰盈的好奇心,似乎学一个技术并没有什么困难的,无非就是花的时间长短而已,早晚都能拿下来的。这种信心也正是我以前所缺失的。而给我印象最深的,是他们对时间的全情倾注,有时为了处理一个bug,漫漫长夜也只在一瞬之间。
短短的三周时间,让我对机器人,神经网络,计算机视觉等有了新的认识。让我对未来的学习生活有了新的希冀与展望。